北京工業機器人力控原理
機器人力控技術為線束裝配帶來的效率提升。在傳統線束生產過程中,人工操作往往需要反復調整線纜位置和端子角度,耗費大量時間。而機器人力控系統通過實時力反饋和自適應控制,能夠自動感知線纜插入時的阻力變化,動態調整機械臂的運動軌跡和力度。在汽車線束生產線上,這種智能化的裝配方式使單工位作業時間明顯縮短,工人可以將更多精力放在質量檢查等關鍵環節上。
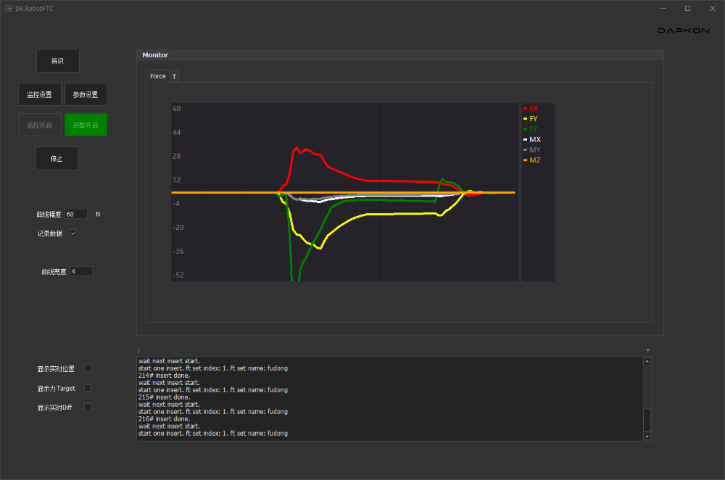
線束連接的可靠性直接影響電氣系統的整體性能。達寬科技的機器人力控系統配備了高精度力傳感器,能夠實時監測壓接過程中的力度變化,并在出現異常時立即報警。在新能源高壓線束生產中,該系統有效避免了因壓力不足導致的接觸不良或壓力過大造成的端子變形。 機器人力控有助于減少元件損傷或裝配不良,維護產品優良品質和良率。北京工業機器人力控原理

引入達寬科技的機器人力控方案進行PCBA裝配,為制造企業帶來多維度價值提升。機器人力控讓機器人在精密裝配中具備更高的適應性和穩定性,既能應對小批量多品種的柔性生產需求,又能保障大批量生產的質量均衡。通過減少調試時間提升生產效率,通過穩定的力控質量降低不良品率,通過安全機制減少物料損耗與設備故障。這種全流程的優化能力,讓機器人力控成為推動PCBA裝配工藝升級的重要支撐,助力企業在電子制造領域持續提升生產效能與市場競爭力。甘肅協作機器人力控抓取借助機器人力控,插接動作更柔和,有效保護精密PCBA和連接器免受不當壓力損傷。
服務器內部存在大量高速連接器和線纜接口,傳統裝配方式容易造成金手指劃傷或插接不到位。機器人力控系統通過微力控制技術,能夠以恰到好處的力度完成各類接口的連接。達寬科技的解決方案針對不同規格的連接器預設了比較好插拔參數,系統會自動識別連接器類型并匹配對應的裝配策略。在內存條安裝、背板連接等關鍵工序中,機器人力控既確保連接可靠,又避免過度用力導致的接口損傷,提升產品可靠性。
達寬科技將機器人力控設計為模塊化方案,兼容主流協作與工業機器人。用戶無需大幅改造現有產線,只需在末端加裝力控模塊并導入服務器裝配工藝包,即可快速投入使用。云端工藝庫定期更新,支持新硬件規格與材料參數,確保系統與時俱進。機器人力控讓機器人成為可靠的裝配助手,助力企業在服務器制造中實現高效、安全與一致的裝配目標
在生產效率優化方面,機器人力控展現出實用價值。傳統電機齒輪裝配中,操作人員需針對不同型號齒輪反復調試機器人程序,校準工裝定位,不僅耗費時間,還難以適應多規格、快換產的生產需求。達寬科技的機器人力控系統通過實時力反饋調節,賦予機器人自主適應能力。面對不同批次齒輪的細微尺寸差異,或裝配工位的輕微偏移,機器人力控能自動修正運動路徑和接觸力度,減少停機調試環節。裝配流程從 “依賴人工調整” 轉為 “系統自主適配”,讓生產線的連續運轉更有保障,間接提升整體生產節奏。機器人力控讓電機裝配更智能,機器人感知接觸力,確保部件配合到位。
效率提升是機器人力控在服務器裝配中展現的重要價值。傳統人工裝配時,操作人員需要反復核對部件位置、調整操作力度,難免因人為因素導致工序停頓或重復操作。機器人力控通過預設的力控參數和路徑規劃,讓機器人能夠自主完成定位、對接等流程,減少不必要的人工干預。達寬科技優化的機器人力控方案進一步提升了機器人的動作協調性和響應速度,使裝配過程更流暢,有效縮短了單臺服務器的裝配周期,幫助企業在相同時間內完成更多產能,間接節省了時間成本。達寬機器人力控優化動力輸出算法,減少曲軸裝配過程能源損耗。山東工業機器人力控系統
用戶體驗更放心,機器人力控操作溫和,避免過度用力損傷精致或敏感表面。北京工業機器人力控原理
機器人力控在電機精密裝配中的技術價值。電機裝配涉及多個精密部件的協同配合,對接觸力控制有著嚴格要求。機器人力控技術為解決這一挑戰提供了可靠路徑。在軸承壓裝、轉子定心等關鍵環節,機器人力控系統能夠實時感知接觸狀態,通過柔順控制自動調整機械臂的位姿和出力大小。達寬科技開發的機器人力控方案,融合高分辨率力覺傳感與動態響應機制,確保部件在接觸瞬間實現自適應引導。操作人員設定目標力閾值后,機器人力控系統即可自主完成精細的壓合過程,有效規避傳統剛性裝配可能導致的部件變形或配合失準。這種基于實時力反饋的裝配方式,提升了復雜組件的首裝成功率,為用戶創造了更流暢的工藝體驗。北京工業機器人力控原理
- 吉林工業機器人力控抓取 2025-10-14
- 江蘇協作機器人力控推廣 2025-10-14
- 陜西機器人力控廠家 2025-10-14
- 上海智能力控系統報價 2025-10-14
- 內蒙古機器人力控使用方法 2025-10-14
- 遼寧工業機器人力控定制 2025-10-14
- 河南機器人力控裝配 2025-10-14
- 山東機器人力控裝配 2025-10-13
- 中國臺灣抓取力控系統優點 2025-10-13
- 中國臺灣工業力控系統優勢 2025-10-13
- 北京條碼數字采集 2025-10-14
- 龍崗區品牌三防手機 2025-10-14
- 嘉興巨型自動化控制系統定制價格 2025-10-14
- 鎮江國產電話交換系統均價 2025-10-14
- 天津數據采集器型號 2025-10-14
- 甘孜組織流程優化工具泛微OA企業管理升級工具 2025-10-14
- 哪里智能大廈管理系統(IBMS)怎么看 2025-10-14
- 本地汽車裝飾用品銷售共同合作 2025-10-14
- 金山區高中雙蹤示波器 2025-10-14
- 云南電商平臺軟件開發24小時服務 2025-10-14