邯鄲汽車防撞360全景
在如今復雜的交通環境下,駕駛安全至關重要,佳興偉誠的車輛 360 全景系統成為了安全駕駛的得力助手。該系統通過四個高清攝像頭的協同工作,將駕駛員的視野范圍從傳統的約 120 度拓展至 360 度,以往令人頭疼的車輛 A 柱盲區、后視鏡盲區、車頭下方盲區等視覺盲區被輕松消除。無論是在狹窄街道會車時,系統能實時顯示車輛與兩側墻體的精確距離,精度可達 ±5 厘米;還是在城中村等復雜路況行駛時,能清晰呈現路邊突然竄出的行人或非機動車。駕駛員借助 360 全景系統,不能了解車輛與周邊障礙物的精確距離和位置關系,系統還會通過動態標尺實時提示安全距離,當距離小于 30 厘米時,顯示屏邊緣會發出紅色警示。同時,系統具備低速自動喚醒功能,當車速低于 20 公里 / 小時,全景畫面會自動切換至對應轉向方向的特寫視角,幫助駕駛員提前做出判斷,從容應對各種狀況,經實際測試,可使車輛刮擦事故發生率降低 70% 以上,為行車安全提供堅實保障。礦山作業環境惡劣,佳興偉誠礦車 360 度全景環視駕駛輔助系統為駕駛員提供清晰視野。邯鄲汽車防撞360全景
自卸車在礦區運輸時,車身長且載貨后視野受限,轉彎和倒車易出事故。佳興偉誠的 自卸車360 全景環視駕駛輔助系統,通過車身四周的高清攝像頭,將實時畫面拼接成全景影像。駕駛員在駕駛室內就能清晰看到車身周圍的礦道、其他車輛及人員。轉彎時,系統自動放大側方盲區畫面,駕駛人員能夠通過屏幕一覽無余的看到側方盲區;倒車時,顯示車尾與障礙物的距離并動態提示。該系統適應礦區顛簸環境,攝像頭防粉塵、抗振動,讓自卸車在復雜路況下行駛更安全,減少碰撞事故。邯鄲汽車防撞360全景360 全景駕駛輔助系統具AI智能算法,可準確識別盲區內的行人、車輛以及障礙物,并及時預警。
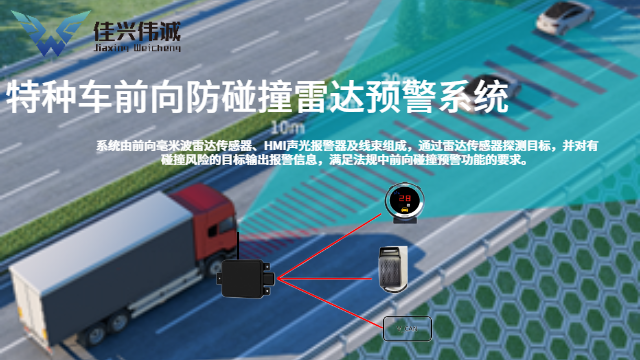
工程車360全景盲區監測預警系統的效能,源于其精密而強大的技術架構。其硬件基石是分布在車身關鍵位置(通常為車頭、車尾、左右后視鏡下方或車身兩側)的4至6顆高性能超廣角魚眼攝像頭,這些攝像頭經過特殊的光學設計和防護處理,具備防水防塵、抗震抗沖擊、寬溫域工作,確保在惡劣工況下持續提供穩定清晰的原始圖像。處理單元搭載高性能圖像處理芯片和算法引擎,實時接收所有攝像頭的視頻流,執行包括畸變矯正、視角變換、多路視頻同步、圖像拼接融合等復雜運算,在駕駛室內的高亮度、防眩光顯示屏上輸出無畸變、低延遲(通常≤50ms)的360度全景鳥瞰視圖。盲區監測預警功能則依賴于集成在車身周圍的毫米波雷達(中短距)和/或超聲波傳感器網絡。雷達波具有穿透雨霧、灰塵的能力,可精確探測移動或靜止障礙物的距離、方位和相對速度。系統通過多傳感器數據融合算法,將視覺信息與雷達探測信息進行時空校準和綜合分析,智能識別潛在威脅目標,濾除誤報(如飄動的篷布、地面雜物),并根據預設的風險評估模型(基于距離、接近速度、方向等)實時觸發的分級聲光報警,將無形風險轉化為操作員可直觀感知的預警信號。
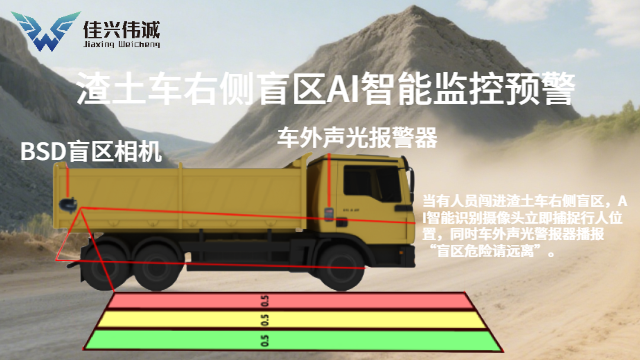
佳興偉誠科技研發的工程車輛360全景環視駕駛輔助系統融入人工智能(AI)技術,實現從“看見周圍”到“理解風險”的質變飛躍。通過在前端攝像頭或中心處理單元集成高性能AI加速芯片,系統能夠實時運行復雜的深度學習模型,對全景影像中的目標進行檢測、分類與跟蹤。這雙“智能之眼”不能識別出車輛、行人、等物體,更能精確區分出靠近人員的姿態。系統結合雷達的測距測速數據與AI視覺的語義信息,構建車輛周圍動態環境的精細化數字孿生。基于此,其預警策略不再是簡單的距離閾值觸發,而是演進為具備預測能力的主動安全防護:例如,當系統識別到有行人正快速從側后方斜進入車輛轉彎內輪差區域,或有人蹲在自卸車正前方輪胎附近時,即使目標尚未進入預設的報警距離,系統也能依據其運動軌跡預測和位置關系,提前發出更高優先級的緊急警報。這種基于AI的意圖理解和風險預測能力,極大提升了預警的性和前瞻性,為操作員爭取到更充裕的避險反應時間,將事故扼殺在萌芽狀態。目標識別準確率高,佳興偉誠車輛 360 全景駕駛輔助系統極大減少誤報,保障駕駛安全。
在繁忙嘈雜的料場、攪拌站或港口碼頭,裝載機需要頻繁穿梭、轉向、舉升、裝卸物料,駕駛員視野受限是影響效率與安全的主要瓶頸。佳興偉誠工程車輛360全景駕駛輔助系統,為裝載機駕駛員裝上“清晰之眼”。系統攝像頭科學布置于駕駛室頂部、引擎罩兩側、后機罩及大臂根部,消除車頭巨大鏟斗及舉升動臂造成的龐大盲區。佳興偉誠先進的圖像拼接算法,在駕駛員前方屏幕實時呈現無縫連接的360度鳥瞰視圖,清晰顯示輪胎與料堆邊緣的距離、后方接近的車輛或人員、側方狹窄通道的通行空間以及舉升時鏟斗與上方障礙物(如料倉、車輛)的間隙。在堆料、取料、裝車等高頻操作中,駕駛員無需完全依賴經驗判斷,借助全景視圖即可控制車輛走位,一次到位完成裝卸,大幅減少進退調整次數,提升作業流暢度。在倒車駛離料堆或穿越復雜路口時,全景視野有效預防碰撞事故。佳興偉誠系統提升了裝載機在有限空間內的機動靈活性與全天候作業安全性。360全景盲區監測系統中駕駛員語音提示器準確播報闖入人員方位,讓駕駛員及時掌握危險位置。北京裝載車盲區360全景電話
工程車360全景駕駛輔助系統能適應弱光環境,通過增強算法使畫面保持清晰,保障作業安全。邯鄲汽車防撞360全景
實踐是檢驗工程車360全景盲區監測預警系統價值的標準,眾多案例證明了其明顯的安全價值。在某大型露天銅礦,礦用寬體自卸車(載重超100噸)因體積巨大、盲區眾多,倒車、轉彎事故頻發。在部署帶毫米波雷達的工程車360全景盲區監測預警系統后,通過精確的內輪差區域預警和后方障礙物探測,18個月內成功避免了多起潛在的碾壓事故,涉及現場巡檢人員和輕型服務車輛,該礦此類事故率統計下降超過70%,安全獲得管理層和工會高度認可。某城市渣土運輸公司,在強制要求和事故賠償壓力下,為其數百輛渣土車加裝了系統。數據顯示,在復雜城區道路(特別是右轉彎)和夜間工地作業中,因盲區導致的行人、非機動車碰撞事故明顯減少,年度保險理賠額下降逾40%,公司安全評分提升,運營資質得以順利延續。一個大型水利樞紐建設工地,在多臺塔式起重機、泵車和高空作業車密集區域引入系統后,起重機操作員能清晰掌握吊臂下方和支腿區域的狀況,泵車司機能有效規避靠近布料桿的人員,項目報告期內未發生一起因設備盲區導致的嚴重人員傷亡事件,業主將此列為安全管理佳實踐。邯鄲汽車防撞360全景
- 榆林礦卡前向防碰撞預警廠家 2025-10-12
- 文山消防車北斗5G定位廠家 2025-10-12
- 瀘州車輛北斗5G定位服務商 2025-10-12
- 張家口主動安全360全景專賣 2025-10-12
- 通遼工程車輛行人防碰撞預警 2025-10-12
- 邯鄲汽車防撞360全景 2025-10-12
- 臨滄礦車北斗5G定位服務商 2025-10-12
- 阿里地區商用車北斗5G定位哪家好 2025-10-12
- 自貢工程車北斗5G定位廠家 2025-10-12
- 黔南州北斗5G防碰撞預警價格 2025-10-12
- 江西眼虹膜識別 2025-10-13
- 上海過濾式防煙面罩供應商 2025-10-13
- 南通小區消防施工 2025-10-13
- 北京智能自動門 2025-10-13
- 廣東直銷廚房滅火系統的用途和特點 2025-10-13
- 中國臺灣紐扣高清AHD外接攝像頭廠家供應 2025-10-13
- 室外報警器 2025-10-13
- 虹口區附近大模型智能客服廠家直銷 2025-10-13
- 山西有軌電動智能伸縮門8米價格 2025-10-13
- 靜安區消防滅火毯裝備 2025-10-13