電機快速對中校正儀保修
AS快速對中校正儀通過多種技術手段來適配高溫、高壓環境,以確保校準的可靠性,具體如下:硬件設計與材料選擇:AS快速對中校正儀部分型號如AS500采用耐高溫的ABS與鋁合金框架,具有較好的熱穩定性和機械強度,能在高溫環境下保持結構的完整性和穩定性,其工作溫度范圍可達-10℃~+55℃,可適應水泥廠窯頭(+50℃)等高溫環境。同時,設備具備一定的防護等級,如IP54防護等級的**度ABS塑料外殼,可有效抵御粉塵、油污等侵蝕,在高壓環境下也能一定程度上防止灰塵和水的進入,保護內部精密電子元件。快速對中校正儀視頻教程。電機快速對中校正儀保修
確保快速對中校正儀存儲在不同設備(內置存儲器、外部存儲、計算機、云端)上的數據安全性,需針對不同存儲場景采取“分層防護+全流程管控”策略,結合物理安全、技術加密、權限管理和操作規范,具體措施如下:一、針對“校正儀內置存儲器”的數據安全措施內置存儲器是數據存儲的“***入口”,需從設備本身的硬件和系統層面筑牢安全基礎:硬件級數據保護選擇具備防篡改設計的儀器,例如部分**型號(如FixturlaserNXAPro)的內置存儲器采用“物理鎖定+防擦除芯片”,避免因誤操作(如誤格式化)或設備故障導致數據丟失;儀器內置備用電池或斷電保護功能,防止測量/存儲過程中突然斷電導致數據寫入中斷、文件損壞。系統級權限管控開啟儀器的“用戶登錄認證”功能(如密碼鎖、指紋解鎖),限制非授權人員(如無關運維人員、外部人員)進入數據管理界面,避免數據被惡意刪除、修改;部分儀器支持“操作日志記錄”,自動留存數據的創建、修改、刪除時間及操作人,一旦出現數據異常可追溯責任。定期本地備份按照運維規范,定期(如每次校準后、每周)將內置存儲器中的數據通過USB、藍牙等方式導出至備用設備(如**計算機、加密U盤),形成“本地雙備份”。 國內快速對中校正儀怎么用快速對中校正儀:多設備兼容,校準無需頻繁換工具。
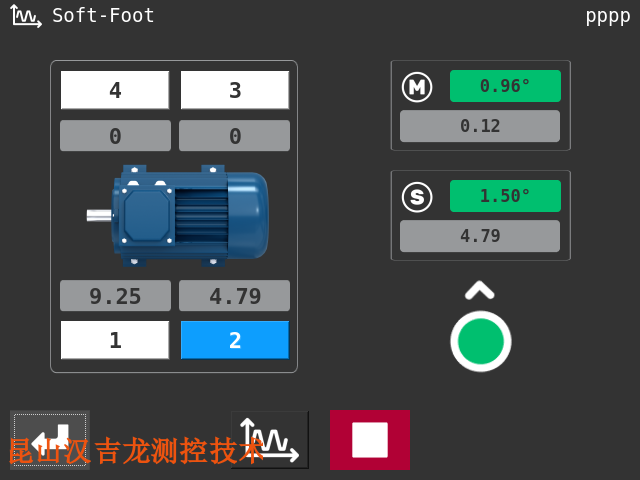
HOJOLO快速對中校正儀采樣數據與偏差的關聯儀器通過旋轉兩軸(通常旋轉360°),采集不同角度下(如0°、90°、180°、270°)的徑向位移數據,假設采集到主動軸與從動軸在“聯軸器近端”(靠近聯軸器的支撐點)和“聯軸器遠端”(遠離聯軸器的支撐點)的位移差,通過以下公式計算偏差:角度偏差計算:α=arctan[(δ遠-δ近)/L]×(180/π),其中L為兩支撐點之間的距離(軸長);平行偏差計算:δ=(δ遠+δ近)/2(取近端與遠端偏差的平均值,反映整體平行偏移)。3.調整量計算:從偏差到可操作值以“電機(主動軸)與泵(從動軸)對中”為例,電機通過前腳和后腳固定在底座上,算法根據偏差值計算前腳和后腳的調整量:若存在角度偏差α,則前腳調整量=α×L前/(180/π),后腳調整量=α×L后/(180/π)(L前為前腳到聯軸器的距離,L后為后腳到聯軸器的距離);若存在平行偏差δ,則前腳與后腳調整量相同=δ(需同時升高/降低前腳和后腳,確保兩軸平行)。上述公式均由儀器內置算法自動執行,運維人員無需手動計算,*需根據儀器輸出的“前腳調整XXmm、后腳調整XXmm”直接操作,這也是其“降低技能要求”的**邏輯之一。
快速對中校正儀憑借其高精度和多功能特性,能夠***覆蓋風機、壓縮機的對中校準需求。以AS軸對中校準測量儀為例,其具體優勢如下:高精度測量:AS測量儀搭載635-670nm半導體激光發射器和30mm視場的高分辨率CCD探測器,像素高達1280×960,測量精度可達±0.001mm。在風機、壓縮機的軸系連接安裝與日常維護中,通過在相連軸上精細安裝激光發射與接收傳感器,能夠精確比較激光束位置,快速、精細地判斷軸是否處于理想對中狀態,并精確量化徑向、軸向偏差及角度偏差數值。如何選擇適合自己的快速對中校正儀?
hojolo推薦若想通過快速對中校正儀實現**優的“高效+降本”效果,選型時需關注與自身場景的匹配度:生產連續性高的行業(化工、電力、冶金):優先選擇支持“在線校準”“高溫高壓環境適配”的型號(如AS系列),減少停機時間,避免產能損失。設備數量多的企業(汽車工廠、紡織廠):選擇支持“批量數據管理”(如云端存儲、批量報表生成)的型號,提高多設備校準效率,降低管理成本。中小型企業或預算有限場景:可選擇基礎款激光對中儀(如單激光、手動調整提示型),以較低投入替代傳統方法,優先解決“人工耗時久、精度低”的**痛點,實現基礎降本。快速對中校正儀的“高效校準”是手段,“節省成本”是**終價值體現——其通過縮短時間、減少損耗、規避風險,從“操作層、維護層、生產層”三層實現成本優化,尤其適合工業設備密集、對生產連續性要求高的企業,是提升設備管理效率、降低長期運維成本的關鍵工具。 高效校準,節省成本!快速對中校正儀。專業快速對中校正儀的作用
從 2 小時到 3 分鐘!快速對中校正儀,讓設備對位效率飆升 600%。電機快速對中校正儀保修
第三步:信號處理與坐標換算接收單元采集的“光斑坐標數據”是原始電信號,需通過儀器內置的微處理器(MCU/CPU)進行信號處理與坐標換算,將“光斑偏移量”轉化為“軸系偏差量”,**步驟包括:信號濾波:通過數字濾波算法(如卡爾曼濾波、滑動平均濾波)去除環境干擾(如振動、光線變化)導致的噪聲信號,保留真實的光斑偏移數據。坐標映射:儀器出廠前已通過校準,建立“光斑在感光芯片上的坐標偏移量”與“兩軸實際偏差量”的映射關系(例如:光斑在X軸偏移1mm,對應兩軸徑向偏差)。微處理器根據該映射關系,將實時采集的光斑坐標換算為兩軸的徑向位移值(平行偏差相關)和角度傾斜值(角度偏差相關)。單位統一:自動將換算后的偏差量轉換為工業常用單位(如mm、mil、度、分),避免人工換算誤差。電機快速對中校正儀保修
- AS設備安裝對心校準儀多少錢 2025-10-13
- 法國快速對中校正儀用途 2025-10-13
- 質量設備安裝對心校準儀調試 2025-10-13
- 機械對中儀服務企業 2025-10-13
- 教學無線激光對中儀維修 2025-10-13
- 歐洲對中儀服務定做 2025-10-13
- 經濟型振動激光對中儀使用視頻 2025-10-13
- 租用激光聯軸器對中儀工作原理 2025-10-13
- 機械對中儀哪里買 2025-10-13
- 振動對中儀定制 2025-10-13
- 呼和浩特工程機械智能油液在線檢測 2025-10-13
- 山東304液位計廠家供應 2025-10-13
- 江蘇便攜式分析儀直銷 2025-10-13
- 通風設備激光對中廠家 2025-10-13
- 重慶機器上用的大理石(花崗石/花崗巖)檢驗平臺 2025-10-13
- 山東ROS位算單元售后 2025-10-13
- 江蘇光纖測溫廠家直銷 2025-10-13
- 黃浦區質量電子產品貨源充足 2025-10-13
- 潮州PH3200型PH儀表哪家強 2025-10-13
- 杭州三維激光掃描儀沉降觀測 2025-10-13