
�l(f��)չ�_Դ�D�λ����� ����˹̹����(y��ng)
�l(f��)؛���c���Ϻ��мζ��^(q��)
�l(f��)���r�g��2025-09-19

�l(f��)؛���c���Ϻ��мζ��^(q��)
�l(f��)���r�g��2025-09-19
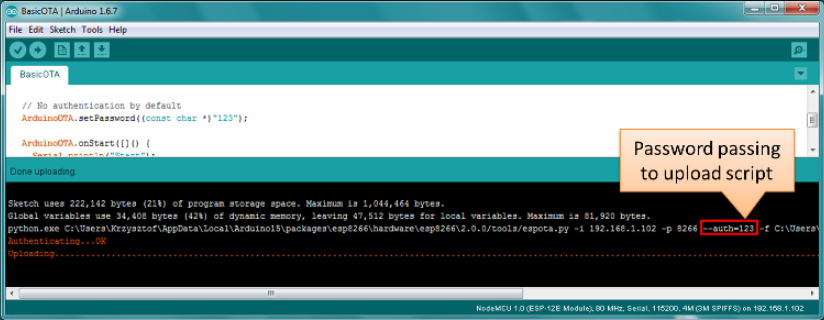
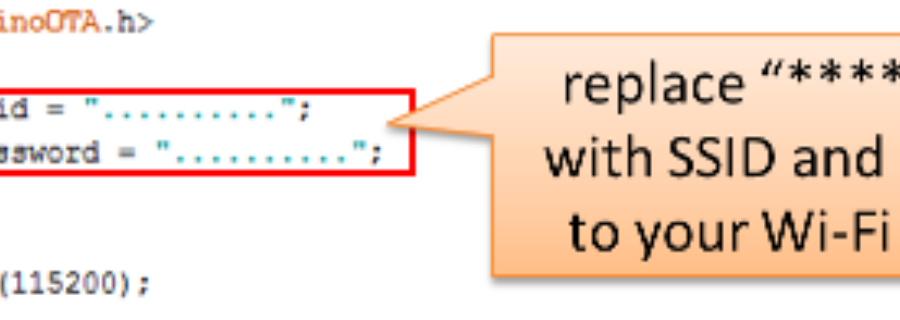
����˹̹�_Դϵ���n���ڵ��g�Σ�10-13�q�� �� Gbot�C�����n�� �����c���W��ͨ�^36�n�r���Ŀ���`����Scratch�D�λ���������Ӳ�����������磬�ڡ����C���ˡ��Ŀ�У��W�����O(sh��)Ӌ���P(gu��n)��(ji��)�Cе�Y(ji��)��(g��u)���Y(ji��)��Ѳ���������c��ģ�K���F(xi��n)�ӑB(t��i)���ϣ�����������s�T���Ŀ�tҪ��W���\����λ�_�P(gu��n)�c�{��ģ�K���{(di��o)ԇ늙CŤ���c�X݆����ϵ�y(t��ng)������������̖����(sh��)��ָ����D(zhu��n)�Q߉���n��ͬ������ GScratchܛ����֧�ֈD�λ�ָ��һ�I�D(zhu��n)�g��Arduino C���a������A�_�l(f��)���O(sh��)������IRM��ِ�_Դ�ֻ�O(ji��n)�y�o�˙C�������t�ⶨλ�`��<2�ס��l(f��)չ�_Դ�D�λ�����
����˹̹�����аl(f��)���@���_Դϵ���n���������(j��)�Ї�������stem�������B(t��i)������10�q����������ĸ����A���`ƽ�_������ںϹ��I(y��)��Ӳ���c�_Դܛ�����B(t��i)��ͨ�^���Cе�Y(ji��)��(g��u)+����·+�㷨���̡������S���ϣ���(g��u)���ˏęCе�;��̵Ļ��A(ch��)�J֪�����䄓(chu��ng)���аl(f��)������·����ԓϵ���n���Ը߾��ȵĽ��ٽY(ji��)��(g��u)����0.01������ȣ��c���T�аl(f��)���_Դ����������GC-500/GC-600�������Ҫ���d�w���Y(ji��)�ϷӼ����̹���朣����_�m�䲻ͬ���g�ΌW�����J֪�l(f��)չ�c��(chu��ng)�����������J�R�_Դϵ��GC-500�������_Դ�O(sh��)Ӌ������ROS���B(t��i)�{(di��o)���\�ӿ���API��
�_Դϵ���r�������|(zh��)������ȫ���_�ŵ��O(sh��)Ӌ�܌W��Ӳ���ϣ��a(ch��n)Ʒ�����X�Ͻ�C����֧�ֿ��ٲ��b���Cе�Y(ji��)��(g��u)�����ģ�K��ܛ���ӿھ���ѭģ�K���O(sh��)Ӌԭ�t���@�N�O(sh��)Ӌ���H�x��a(ch��n)Ʒ���I(y��)���������ԣ����W�������̎�һ�����ɽM�ς��������������c��(zh��)����������ͨ�^����Arduino�Uչ�����؝�Ȃ��������C����?q��)�Scratch�D�λ�����o�p�D(zhu��n)����Arduino���a�M�еӃ�(y��u)����ܛ�����棬Gscratch����ƽ�_���^��Scratch 2.0�����Ե�ͬ�r�����������Ӳ������ģ�Kһһ�W����ק���������ϡ��eľ�K�r�����H���ڲٿ�GC-500�������(q��)���挍����������ƽ�_�ṩ�ġ����a��ҕ�������ܿ�һ�I���D�γ����D(zhu��n)��C�Z�ԣ����F(xi��n)�Ŀ�ҕ�����̵����I(y��)���_�l(f��)��ƽ���^�ɡ��@�N���D�λ����T�����a�����롱���p܉�O(sh��)Ӌ���Ƚ����ˌW���T�����֞���A̽�������˿��g��
�P(gu��n)�ڽ����_Դϵ���n��һһ���g�Σ�10-13�q�� �� Gbot�C�����n�� �����c���W��ͨ�^36�n�r���Ŀ���`����Scratch�D�λ���������Ӳ�����������磬�ڡ����C���ˡ��Ŀ�У��W�����O(sh��)Ӌ���P(gu��n)��(ji��)�Cе�Y(ji��)��(g��u)���Y(ji��)��Ѳ���������c��ģ�K���F(xi��n)�ӑB(t��i)���ϣ�����������s�T���Ŀ�tҪ��W���\����λ�_�P(gu��n)�c�{��ģ�K���{(di��o)ԇ늙CŤ���c�X݆����ϵ�y(t��ng)������������̖����(sh��)��ָ����D(zhu��n)�Q߉���n��ͬ������ GScratchܛ����֧�ֈD�λ�ָ��һ�I�D(zhu��n)�g��Arduino C���a������A�_�l(f��)���O(sh��)������δ������_Դ�������f(xi��)�������m(x��)�M����
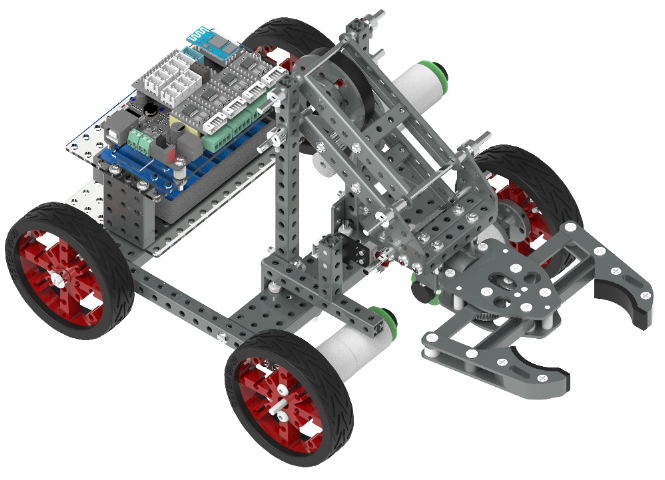
����˹̹�C���˽����_Դ�a(ch��n)Ʒ�IJ�����Ҫ�ǽY(ji��)��(g��u)�������X�Ͻ�(g��u)�������ù��I(y��)���X�Ͻ���ϣ�֧�ֿ��ٲ��b���Y(ji��)��(g��u)������ȿ��_0.01mm����ʹ���^���пɴ_���Cе��(w��n)���ԡ�����Y(ji��)��(g��u)��������ƴ���O(sh��)Ӌ�����ݘ���ʽ�eľ�wϵ��ͬ�r֧�ֶ�C����������ģ�K�����ɔUչ���ɘ�(g��u)���ĺ��ΙCе�۵������ɶȷ����C���ˣ�������ߡ�����Ȯ���ď�(f��)�s�ΑB(t��i)�����g���ɶȃ�(y��u)���������C�����P(gu��n)��(ji��)֧�ֶ����ɶ��\�ӣ�������C�����_12���ɶȣ���ģ�M���ﲽ�B(t��i)�c�ӑB(t��i)ƽ�⡣Ѳ�����������F(xi��n)����·����ۙ���m���Ԍm�����ȏ�(f��)�s�������J�R�_Դϵ��
���ɫ���ϵ�y(t��ng)���ں�OpenCV�c�Cе�ۿ��ƣ����F(xi��n)�����֒����ȡ��l(f��)չ�_Դ�D�λ�����
�_Դ�n����C/C++�Z�Ԟ����c���W�������̈D�O(sh��)Ӌ���֣����M�A�����I(y��)�����a�_�l(f��)���n��ͨ�^GLP�D�λ�ܛ�����F(xi��n)����߉�Ŀ�ҕ���^��һһ������ק����C�Ƕȡ����h(hu��n)���⏊�ȡ��ȷeľ�K���ɿ���ָ���һ�I�D(zhu��n)�g��Arduino���a�������A�Z�ԵČW���T�����ڸ��A�Σ��W���辎���㷨���ƶ����ɶ�ϵ�y(t��ng)����顰���C���ˡ��O(sh��)Ӌ��ʳ߉��ͨ�^���݃x��(sh��)��(j��)�z�y���w�Aб�ȣ��Y(ji��)�ϳ��y���|�l(f��)�Cе��ץȡ���������F(xi��n)�����О�ĄӑB(t��i)푑�(y��ng)���n�̌����(f��)�sϵ�y(t��ng)��ԭ���_�l(f��)���硰�ɫ���ϵ�y(t��ng)�����ں�OpenCVҕ�X�R�e�c�Cе�ۿ��ƣ�ͨ�^YOLOģ�ͅ^(q��)�����w�ɫ��ָ�]�֒��C��(g��u)��ɺ���������������������ˮ�����t��f(xi��)�{(di��o)���͎�늙C���Cеצ�c�t��Ӌ��(sh��)ģ�K��ģ�M���I(y��)�Ԅӻ����̡��@Щ�Ŀ���HҪ��W��؞ͨ�Cе�����W�c���м��g(sh��)�������\�ù��̵���˼�Sһһ�ڡ��������ƽ�_�A(y��)�ݿ����L����ؓ�d��������ͨ�^ʾ�����O(ji��n)�y���wӲ���\�Ѕ���(sh��)����(y��u)�����a�c�Y(ji��)��(g��u)�O(sh��)Ӌ�����s�аl(f��)���ڡ��l(f��)չ�_Դ�D�λ�����




